
 Hogar
Hogar





Motor de accionamiento servo armónico BLDC del módulo del motor de la articulación del brazo del robot de CC sin escobillas sin marco
Información básica.
| N º de Modelo. | M8010E17B50L |
| Función | Conduciendo |
| Protección de la carcasa | Tipo a prueba de explosiones |
| Estructura y principio de funcionamiento | Sin escobillas |
| Certificación | CE |
| Marca | Hojalatero |
| Actual | 3.5A |
| Reacción | <20 segundos de arco |
| Voltaje de suministro | 36V(±10%) |
| Fuerza de motor | 100W |
| Resolución del codificador de salida | Lazo único de 15 bits Lazo múltiple de 9 bits |
| Peso | 1 kg |
| Modo de comunicación | Anopen/Canbus/ |
| Temperatura ambiente | 0~40ºC |
| Relación de reducción del reductor | 50 |
| Par de salida después de la desaceleración | 35n.M |
| Artículo | Robot Motor sin escobillas Servomotor Delta para Roboti |
| Valor máximo permitido de carga promedio | 34n.M |
| Par nominal | 21n.M |
| Rango de velocidad después de la desaceleración | 0-30 rpm |
| Par máximo permitido momentáneo | 91 millas náuticas |
| Paquete de transporte | Caja de cartón |
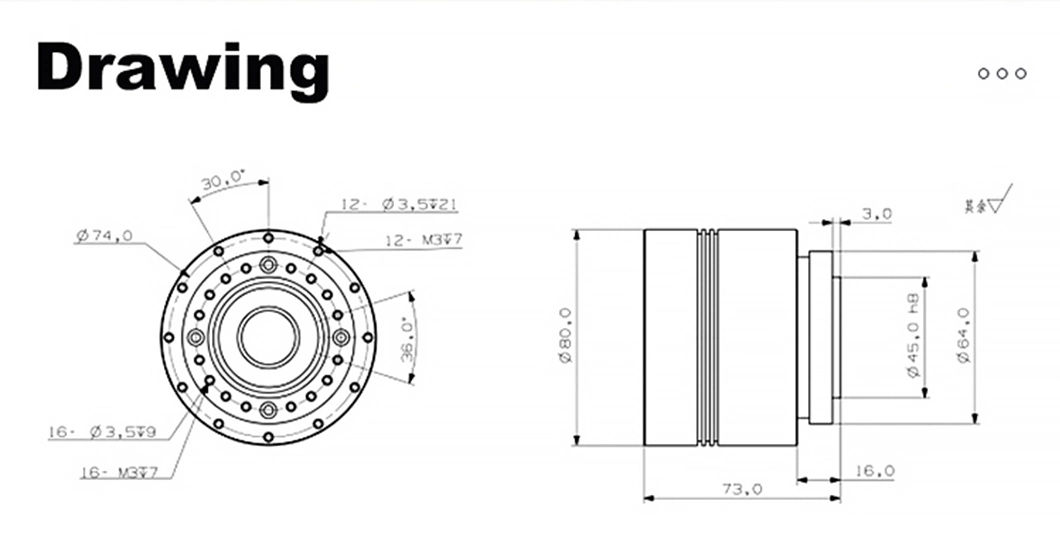
| Especificación | 225*208*118mm |
| Marca comercial | HOJALATERO |
| Origen | Porcelana |
| Código hs | 8479909090 |
| Capacidad de producción | 10000/año |
Empaquetado y entrega
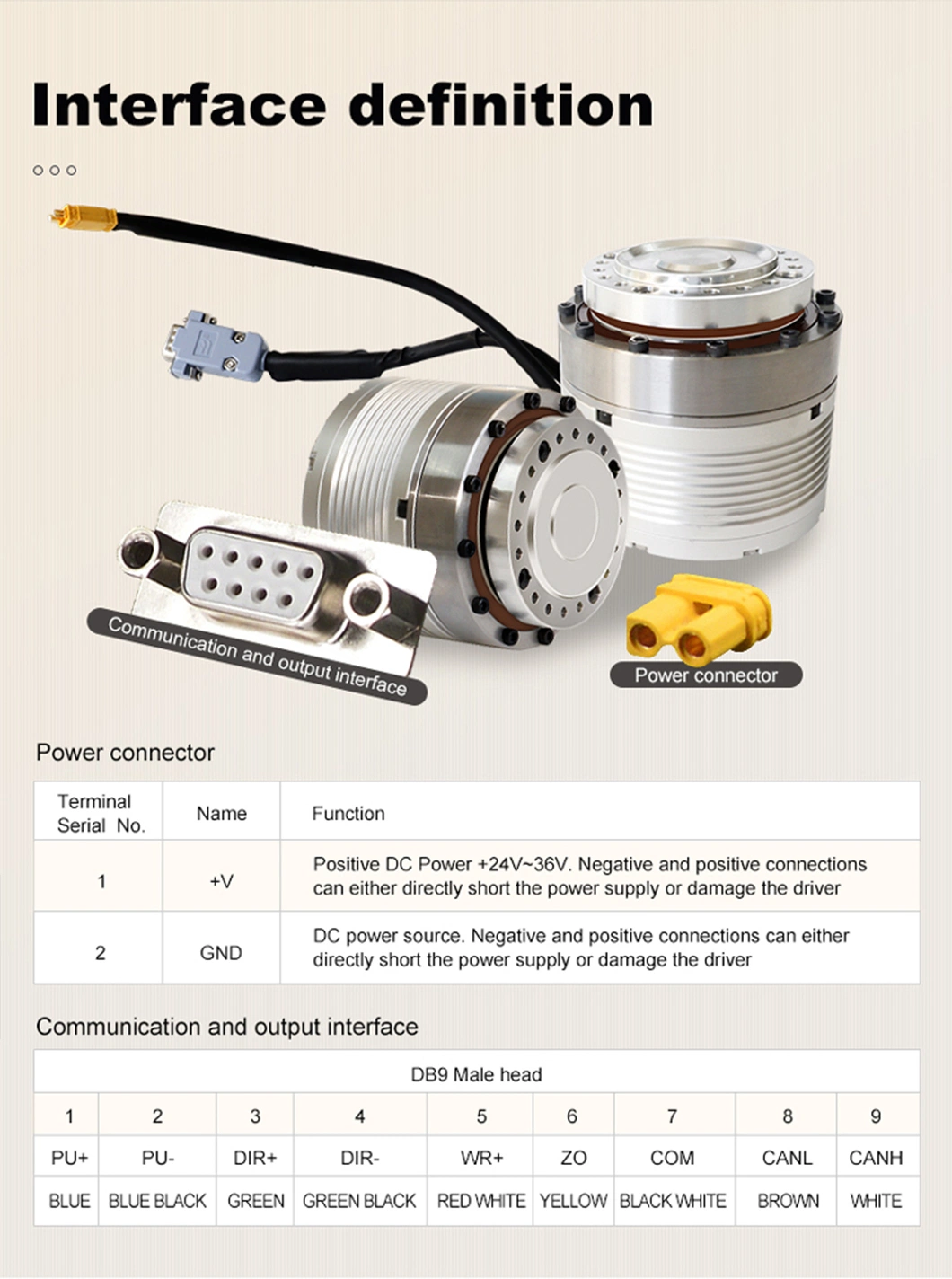
Tamaño del paquete 22.50cm * 20.80cm * 11.80cm Peso bruto del paquete 2.000kgDescripción del Producto
Servomotor delta del motor sin escobillas del robot para prototipo de brazo robótico Descripción del productoEl servomotor del actuador de articulación del robot de tamaño pequeño con diámetro exterior de 80 mm se utiliza principalmente para el brazo del robot, el reductor de armónicos integrado, el codificador, el motor de CC y el controlador. El servomotor de articulación del robot podría usarse directamente en la articulación del brazo del robot, lo que ayuda a construir articulaciones del robot rápidamente.
1. Aislar la comunicación CANopen según la especificación CiA301 V4.2.0
A. Soporta SDO, TPDO, RPDO.
B. Modo de velocidad de soporte, modo de posición (modo de contorno, modo de interpolación)
C. Apoyar la producción y el consumo de latidos del corazón.
2. Codificador absoluto de 15 bits, pulso de una vuelta hasta 32768.
3. Estructura de motor DD de múltiples etapas, gran par de salida.
4. El reductor de armónicos, el motor, el controlador y el codificador están integrados.
5. Bajo ruido, baja vibración, posicionamiento de alta velocidad, alta confiabilidad.
6. Control vectorial orientado al campo FOC, bucle cerrado de posición/velocidad de soporte.
7. Puede funcionar con histéresis cero dado el estado de pulso, después de histéresis cero.
8. Funciones de engranajes electrónicos de 16 bits.
9. Se proporciona una computadora superior CANopen, que puede monitorear el estado del motor y modificar los parámetros.
10. Modo de posición, admite pulso + señal de dirección, codificador a seguir.
11. Modo de velocidad, admite regulación de velocidad de señal del ciclo de trabajo PWM
12. Tiene la función de bloquear la rotación, protección contra sobrecorriente y protección contra sobretensión.
13. Valor absoluto de bajo consumo de energía y multivuelta.
A. La versión de comunicación servo 485/CAN todo en uno puede agregar función multigiro.
B. Cuando el motor está encendido, hay un circuito de carga en el interior para cargar la batería. Cuando el motor está apagado, el consumo de corriente de la batería es de sólo 0,07 mA.
C. Después de que el motor no tiene suministro de energía, el eje del motor se hace girar para activar el codificador y continuar memorizando la posición.
D. Rango de memoria multivuelta -60000 ~ 60000 vueltas.
E. Configuración simple del origen, se puede configurar como origen en cualquier posición.
F. Múltiples métodos de retorno a cero: retorno a cero de comunicación, retorno a cero automático al encender y salida de señal de punto cero.
G. Protección contra errores: alarma de fallo de alimentación de la batería.
Altamente integrado Este modelo de módulo de articulación robótica integra motor de CC, controlador, codificador y reductor de armónicos. | |
Soporte SDO TPDO RPDO Proporciona software de computadora host CANopen que puede monitorear el estado del motor y modificar parámetros. | |
Modo de posición Los módulos de articulación robótica de este modelo admiten el codificador de señal Pulse+Direction a continuación | |
| Modo de control de velocidad del ciclo de trabajo PWM | |
Comunicación CANopen aislada Fuente de alimentación aislada incorporada Batería incorporada de valor absoluto multivuelta de menor consumo de energía Carga automática |
| Parámetro del modelo | M8010E17B50 | M8010E17B80 | M8010E17B100 | ||
| Parámetro general | Tensión nominal del motor | 36VCC±10% | 36VCC±10% | 36VCC±10% | |
| Corriente nominal del motor | 3.5A | 3.5A | 3.5A | ||
| Par de salida después de la desaceleración | 34 millas náuticas | 35 millas náuticas | 51 millas náuticas | ||
| Peso | 1 KG | 1 KG | 1 KG | ||
| Rango de velocidad después de la desaceleración | 0~30RPM | 0~18RPM | 0~18RPM | ||
| Parámetro reductor | Relación de reducción | 50 | 80 | 100 | |
| Par nominal de salida | 34 millas náuticas | 35 millas náuticas | 51 millas náuticas | ||
| Par máximo arranque-parada | 44 millas náuticas | 56 millas náuticas | 70 millas náuticas | ||
| Retroceso | Menos de 20 segundos de arco | Menos de 20 segundos de arco | Menos de 20 segundos de arco | ||
| Vida de diseño | 8500 horas | 8500 horas | 8500 horas | ||
| Parámetro del motor | Esfuerzo de torsión | 1 milla náutica | 1 milla náutica | 1 milla náutica | |
| velocidad nominal | 1500RPM | 1500RPM | 1500RPM | ||
| Velocidad de rotación máxima | 2000RPM | 2000RPM | 2000RPM | ||
| Fuerza | 100W | 100W | 100W | ||
| Resistencia | 0,86 | 0,86 | 0,86 | ||
| Inductancia | 0,8 mh | 0,8 mh | 0,8 mh | ||
| Inercia rotatoria | 0,69x10-4 | 0,69x10-4 | 0,69x10-4 | ||
| kilogramos/m2 | kilogramos/m2 | kilogramos/m2 | |||
Con diseño modular, módulo de unión compacto, su peso, tamaño, modo de instalación y apariencia de la lámpara en comparación con los productos tradicionales se han optimizado considerablemente, se utiliza principalmente en robots cooperativos y robots livianos, puede satisfacer las necesidades de miniaturización, peso ligero y modulares en gran medida. También puede ser ampliamente utilizado en robots industriales, robots de servicio, equipos de automatización industrial, equipos de torno, etc.
Zhengzhou Defy Mechanical&Electrical Equipment Co., Ltd. es un fabricante profesional de módulos de juntas robóticas. Nuestra fábrica se dedica a la investigación de reductores armónicos y motores de articulación robótica desde la década de 2010, más de 10 años de experiencia hacen que la calidad de nuestros productos ocupe una posición de liderazgo en China. Con una producción anual de 10. 000 juegos de diversos productos para el mercado, con alta precisión y rendimiento estable, nuestros módulos de articulación robótica son bienvenidos por clientes de India, Tailandia, Irán, Corea del Sur, Federación Rusa, Suecia, Irlanda, Polonia, Estados Unidos, Canadá, Francia, etc.

1. Aceptamos pedidos pequeños de módulos de articulación de robot;2. El tiempo de entrega del pedido de muestra de módulos de articulación robótica es de 10 días, el tiempo de entrega del pedido de cantidad masiva es de 7 a 15 días;3. Podemos aceptar pagos a través de PayPal, T/T y L/C; 4. La garantía de calidad de nuestros módulos de articulación robótica es de 1 año y podemos brindarle soporte técnico profesional; 5. Proporcionamos capacitación gratuita en software sobre cómo utilizar los módulos de articulación del robot. Los ingenieros están disponibles para soporte técnico.
Preguntas más frecuentesP: ¿Es usted una empresa comercial o un fabricante?
R: Somos fabricantes y empresas comerciales.
P: ¿Puedo hacer un pedido de muestra?
R: Sí, aceptamos pedidos de muestra para probar y verificar la calidad.
P: ¿Cuánto dura el tiempo de entrega?
R: Debido al complejo proceso, la producción demora entre 8 y 10 días hábiles. Para productos personalizados, consulte con nosotros antes de realizar el pedido.P. ¿Cómo envían la mercancía y cuánto tardan en llegar?
R: Generalmente por expreso, como DHL, UPS, FedEx, EMS o TNT; Por aire y mar también están disponibles. Express tarda de 3 a 15 días en llegar
P: ¿Cuáles son sus condiciones de pago?
R: Aceptamos pedidos de garantía comercial, TT, Paypal, West Union y L/C.